Our Product

TACTILE FINGERTIP™
Our fingertips help us navigate the world. They signal us to quickly withdraw our hand after touching a painful surface, like a sharp or a stove, and also allow us to delicately press a guitar string or piano key to create music. Human grasp is gentle, yet firm.
Ras Labs' Tactile Fingertip for robots can duplicate these capabilities, providing an understanding of touch (first point of contact, position, shape, size, density, glide) in real time. By combining softness and durability with touch sensing, our touch-sensing systems bring human fingertip-like tactile touch to robots, cobots, and humanoids.

TACTILE CONTROL WRIST™
Tactile Fingertip feedback becomes useful command information for both the gripper and robot arm. With rapid data processing and visualization, end users can easily adjust the threshold and the gripper's response to Tactile Fingertip feedback. This is a plug-and-play solution - ROS and ROS 2 compatible.

TACTILE PNEUMATIC CONTROLLER™
The Tactile Pneumatic Controller is similar to the Tactile Control Wrist, but applies communications and actuation to pneumatic grippers.
Pressurized air is controllably delivered to gently apply force and adjust for any slippage. Grip information and options are displayed through our user interface. This is a plug-and-play solution - ROS and ROS 2 compatible.

Grippers With a Sense of Touch
Ras Labs has combined material science innovation with physical AI and precision engineering to provide state-of-the-art touch-sensing systems for robots, cobots, and humanoids.
Ras Labs' Tactile Fingertips and Tactile Control Wrist integrate to form a powerful, closed-loop manipulator for fragile and delicate objects with ease and precision.

In addition to electric grippers, our Tactile Fingertips and Tactile Pneumatic Controller also bring closed-loop manipulation to pneumatic robotics and automation.
The Tactile Pneumatic Controller connects to the Tactile Fingertips, as well as an air supply, to adjust grip strength on the fly.
Features and Benefits
Sensitivity
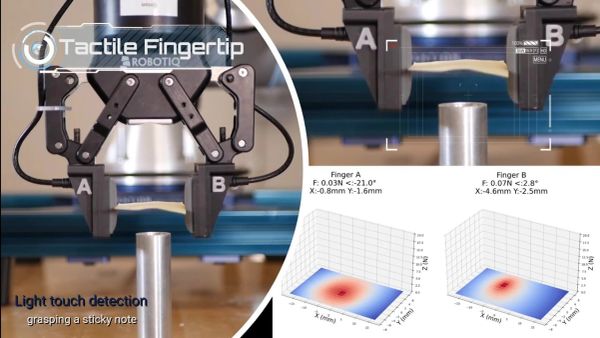
Engineered for extreme sensitivity, the Tactile Fingertip routinely detects to 0.05 N (and to 0.005 N in max sensitivity mode) and also has a wide force-pressure range of detection (up to 45 N and over with high linearity). In its max sensitivity mode, the Tactile Fingertip can detect heartbeats based on pressure, including the components of heartbeats, at various pulse points.
Tactile Fingertips easily pick up a single Post-it note by the edges.
Accuracy
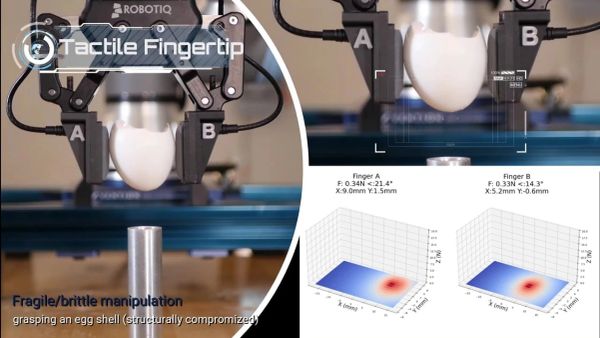
The Tactile Fingertip force detection ranges from 0.05 N (routine use) to over 45 N sensitivity with 1 mm² resolution. Fragile objects like glassware, and even an eggshell, can be gripped, lifted, and placed without any damage. The robotic gripper is controlled immediately and proportionally in order to provide for an exceptionally gentle grasp of delicate objects without having to sacrifice speed.
Human-Like Control
Human touch can detect around 0.1 N force with 2 mm spatial resolution. Ras Labs is giving traditional robotic grippers, AI-ML gloves, and collaborative and humanoid robots the ability to pick up fragile objects with an extremely human-like grasp, easily handling objects without damage from either crushing or slippage. Ras Labs makes touch easy.
Watch the Tactile Fingertips adjusting to a detected change from the pushed object (slip). The Tactile Fingertip touch-sensing system grips the ball slightly harder to maintain good grasp, intuitively and proportionately, just like us humans do.
Data Visualization
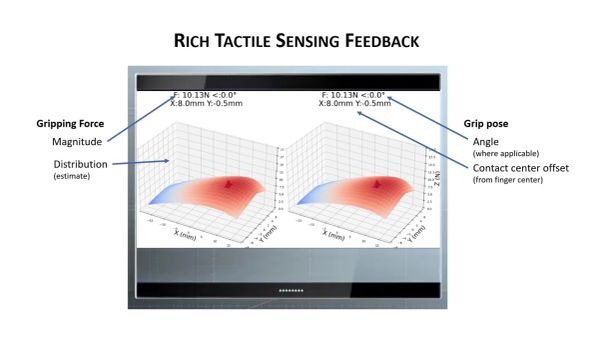
The quality of a good grasp, gentle, yet firm, comes from the dynamic integration of force and position in real time. Our Tactile Control Wrist and Tactile Pneumatic Controller visualize the Tactile Fingertip data for user-friendly calibration of grip strength, touch thresholds, and speed.

Physical AI and Machine Learning
Our Tactile Fingertips use a variety of algorithms to acquire high-precision data. Machine learning (ML) and physical artificial intelligence (physical AI) make human-like intuition and dexterity possible for a variety of tasks and scenarios. ML identifies trends and patterns from large collections of data, which provides a richness in the outputs and capabilities of our tactile touch-sensing systems.

Durability
Our patented soft and compliant, yet durable touch-sensing materials and systems achieve next-level better manipulation without damaging objects and also protect your robotic hardware. Tactile Fingertips are robust (fatigue-tested to over 20 million use case cycles, including shear, with full functionality), exceedingly sensitive, and have a wide pressure range. Ras Labs makes robotic touch easy.